

BLDC電機控制算法
無刷電機屬于自換流型(自我方向轉換),因此控制起來更加復雜。
BLDC電機控制要求了解電機進行整流轉向的轉子位置和機制。對于閉環速度控制,有兩個附加要求,即對于轉子速度/或電機電流以及PWM信號進行測量,以控制電機速度功率。
BLDC電機可以根據應用要求采用邊排列或中心排列PWM信號。大多數應用僅要求速度變化操作,將采用6個獨立的邊排列PWM信號。這就提供了最高的分辨率。如果應用要求服務器定位、能耗制動或動力倒轉,推薦使用補充的中心排列PWM信號。
為了感應轉子位置,BLDC電機采用霍爾效應傳感器來提供絕對定位感應。這就導致了更多線的使用和更高的成本。無傳感器BLDC控制省去了對于霍爾傳感器的需要,而是采用電機的反電動勢(電動勢)來預測轉子位置。
無傳感器控制對于像風扇和泵這樣的低成本變速應用至關重要。在采有BLDC電機時,冰箱和空調壓縮機也需要無傳感器控制。
死區的插入和補充
許多不同的控制算法都被用以提供對于BLDC電機的控制。典型地,將功率晶體管用作線性穩壓器來控制電機電壓。當驅動高功率電機時,這種方法并不實用。
高功率電機必須采用PWM控制,并要求一個微控制器來提供起動和控制功能。
控制算法必須提供下列三項功能:
--用于控制電機速度的PWM電壓
--用于對電機進整流換向的機制
--利用反電動勢或霍爾傳感器來預測轉子位置的方法
脈沖寬度調制僅用于將可變電壓應用到電機繞組。有效電壓與PWM占空度成正比。當得到適當的整流換向時,BLDC的扭矩速度特性與直流電機相同。可以用可變電壓來控制電機的速度和可變轉矩。
功率晶體管的換向實現了定子中的適當繞組,可根據轉子位置生成最佳的轉矩。在一個BLDC電機中,MCU必須知道轉子的位置并能夠在恰當的時間進行整流換向。
BLDC電機的梯形整流換向
對于直流無刷電機的最簡單的方法之一是采用所謂的梯形整流換向。
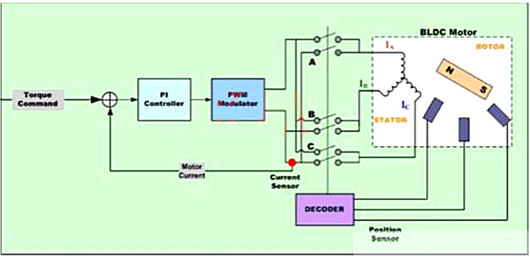
1:用于BLDC電機的梯形控制器的簡化框圖
在這個原理圖中,每一次要通過一對電機終端來控制電流,而第三個電機終端總是與電源電子性斷開。
嵌入大電機中的三種霍爾器件用于提供數字信號,它們在60度的扇形區內測量轉子位置,并在電機控制器上提供這些信息。
由于每次兩個繞組上的電流量相等,而第三個繞組上的電流為零,這種方法僅能產生具有六個方向共中之一的電流空間矢量。
隨著電機的轉向,電機終端的電流在每轉60度時,電開關一次(整流換向),因此電流空間矢量總是在90度相移的最接近30度的位置。
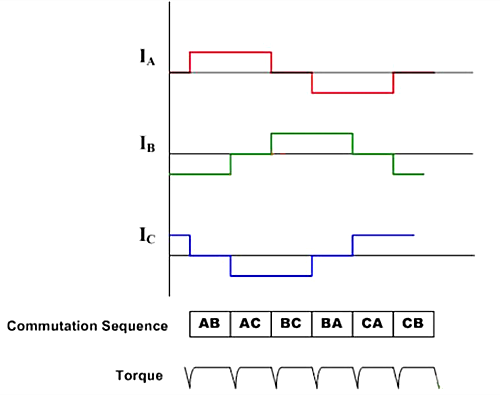
圖2:梯形控制:驅動波形和整流處的轉矩
因此每個繞組的電流波型為梯形,從零開始到正電流再到零然后再到負電流。
這就產生了電流空間矢量,當它隨著轉子的旋轉在6個不同的方向上進行步升時,它將接近平衡旋轉。
在像空調和冰霜這樣的電機應用中,采用霍爾傳感器并不是一個不變的選擇。在非聯繞組中感應的反電動勢傳感器可以用來取得相同的結果。
這種梯形驅動系統因其控制電路的簡易性而非常普通,但是它們在整流過程中卻要遭遇轉矩紋波問題。
BDLC電機的正弦整流換向
梯形整流換向還不足以為提供平衡、精準的無刷直流電機控制。這主要是因為在一個三相無刷電機(帶有一個正統波反電動勢)中所產生的轉矩由下列等式來定義:
轉軸轉矩= Kt [IRSin(o) + ISSin(o+120) +ITSin(o+240)]
其中:
o為轉軸的電角度
Kt為電機的轉矩常數
IR, IS和IT為相位電流
如果相位電流是正弦的:IR = I0Sino; IS = I0Sin (+120o); IT = I0Sin (+240o)
將得到:
轉軸轉矩= 1.5I0*Kt(一個獨立于轉軸角度的常數)
正弦整流換向無刷電機控制器努力驅動三個電機繞組,其三路電流隨著電機轉動而平穩的進行正弦變化。
選擇這些電流的相關相位,這樣它們將會產生平穩的轉子電流空間矢量,方向是與轉子正交的方向,并具有不變量。這就消除了與北形轉向相關的轉矩紋波和轉向脈沖。
為了隨著電機的旋轉,生成電機電流的平穩的正弦波調制,就要求對于轉子位置有一個精確有測量。霍爾器件僅提供了對于轉子位置的粗略計算,還不足以達到目的要求。基于這個原因,就要求從編碼器或相似器件發出角反饋。

圖3:BLDC電機正弦波控制器的簡化框圖
由于繞組電流必須結合產生一個平穩的常量轉子電流空間矢量,而且定子繞組的每個定位相距120度角,因此每個線組的電流必須是正弦的而且相移為120度。
采用編碼器中的位置信息來對兩個正弦波進行合成,兩個間的相移為120度。然后,將這些信號乘以轉矩命令,因此正弦波的振幅與所需要的轉矩成正比。結果,兩個正弦波電流命令得到恰當的定相,從而在正交方向產生轉動定子電流空間矢量。
正弦電流命令信號輸出一對在兩個適當的電機繞組中調制電流的P-I控制器。第三個轉子繞組中的電流是受控繞組電流的負和,因此不能被分別控制。每個P-I控制器的輸出被送到一個PWM調制器,然后送到輸出橋和兩個電機終端。
應用到第三個電機終端的電壓源于應用到前兩個線組的信號的負數和,適當用于分別間隔120度的三個正弦電壓。
結果,實際輸出電流波型精確的跟蹤正弦電流命令信號,所得電流空間矢量平穩轉動,在量上得以穩定并以所需的方向定位。
一般通過梯形整流轉向,不能達到穩定控制的正弦整流轉向結果。然而,由于其在低電機速度下效率很高,在高電機速度下將會分開。
這是由于速度提高,電流回流控制器必須跟蹤一個增加頻率的正弦信號。同時,它們必須克服隨著速度提高在振幅和頻率下增加的電機的反電動勢。
由于P-I控制器具有有限增益和頻率響應,對于電流控制回路的時間變量干擾將引起相位滯后和電機電流中的增益誤差,速度越高,誤差越大。這將干擾電流空間矢量相對于轉子的方向,從而引起與正交方向產生位移。
當產生這種情況時,通過一定量的電流可以產生較小的轉矩,因此需要更多的電流來保持轉矩,效率降低。隨著速度的增加,這種降低將會延續。
在某種程度上,電流的相位位移超過90度。當產生這種情況時,轉矩減至為零。通過正弦的結合,上面這點的速度導致了負轉矩,因此也就無法實現。
電話:18923864027(同微信)
QQ:709211280
〈烜芯微/XXW〉專業制造二極管,三極管,MOS管,橋堆等,20年,工廠直銷省20%,上萬家電路電器生產企業選用,專業的工程師幫您穩定好每一批產品,如果您有遇到什么需要幫助解決的,可以直接聯系下方的聯系號碼或加QQ/微信,由我們的銷售經理給您精準的報價以及產品介紹